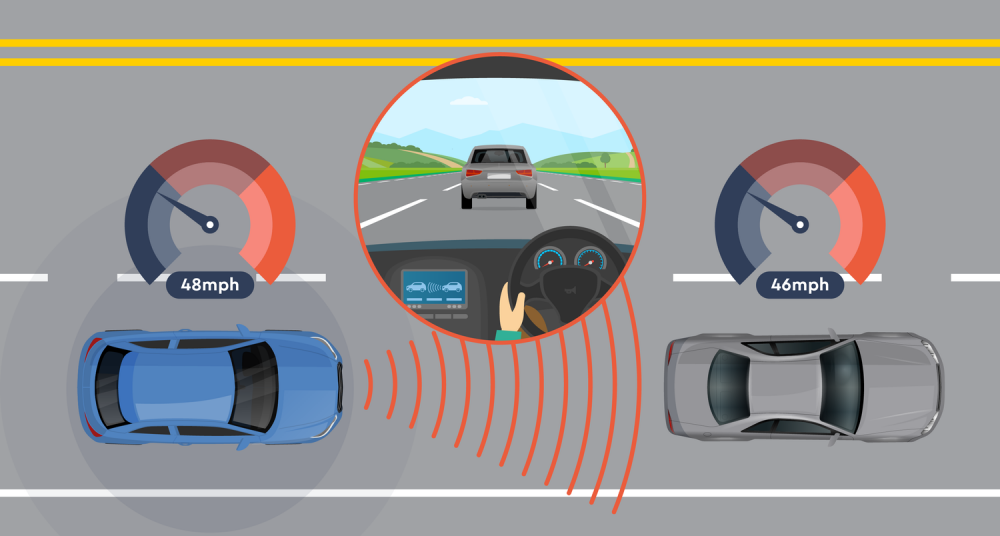
The method by which the control is established is by on-board sensors which contain the data that is used to adjust the speed of the car. The sensors used, such as radar and laser, allows the car to slow down when traffic increases or when a vehicle in front of it slows down and allows the car to speed up when traffic decreases of when a safe distance occurs between the car in front to allow sufficient acceleration. While being under the research topic of self-driving cars, these systems are called Level – 1 autonomous control systems. This is because you will not have a completely self-driven vehicle with this system installed as the steering and detection of vehicles in the sides and back must be done manually by the driver.
As briefly mentioned before, there are several types of autonomous cruise control systems. The radar-based cruise control system uses the medium of sound to reflect off vehicles in front. The advantage of this system being it can detect cars in front even in adverse weather situations. The disadvantage of this method is it detects small plastics on the road and this would immediately make the system assume it has detected a car in front and would reduce the velocity of the vehicle.
The other system type is a laser based autonomous cruise control system. In this system, the sensors employ the use of a laser light to detect vehicles. Here, the monochromatic light ray hits the rear end of the car in front and reflects back to the sensor, which communicates the information to the control systems. The disadvantage in this system is that it cannot be employed in bad climatic conditions as the light ray would refract a lot and hence cause false data to be stored.
Apart from this, there are assisting systems, multi-sensor systems and predictive systems. Assisting systems employ a radar system and hence is used to caution the driver regarding a vehicle in front. It can also sometimes apply the brake if the risk is too high.
Multi-sensory systems use a myriad of sensors which are placed in multiple locations on the car. This allows GPS navigation with several radar sensors in the vehicle that can potentially be used in a self-driving car prototype.

There are also predictive systems which think very close to human drivers. The predictive model predicts the path of the vehicle ahead and adjusts the speed of the car based on this information. It can be used to predict scenarios up to 4 seconds before they actually occur.